![]() ماڊل: D10 2D LiDAR
ماڊل: D10 2D LiDAR
استعمال ڪندڙ جو دستور
جلدي شروع
پڪ ڪريو ته USB ڊرائيور انسٽال ٿيل آهي ۽ USB ڪيبل کي پي سي ۾ لڳايو،
ڊوائيس کي پاور سپلائي سان ڳنڍيو (+5V±10%، 3A)،
اسان جي ڊيٽا جي حصول ۽ تجزيو سافٽ ويئر کي هلائڻ،
پوءِ صحيح ڪميونيڪيشن پورٽ چونڊيو ۽ بيڊ جي شرح کي 921600bps تي سيٽ ڪريو.
شروع بٽڻ کي دٻايو "" ۽ ڪم ڪرڻ شروع ڪريو!
(نسخو V8.01.8)
وڌيڪ معلومات ۽ حمايت لاء، مهرباني ڪري دورو ڪريو http://www.top1sensor.com
وضاحتون
| شيون | پيرا ميٽر |
| اسڪيننگ جي حد 1 | 0.15m-10m، 6m@10% |
| ماپ جي غلطي 2 | ±3CM@IOM@I0Hz |
| اسڪيننگ زاويه جي حد | 360° |
| زاويه قرارداد | 0.28° |
| اسڪيننگ فریکوئنسي 3 | 10Hz |
| تعدد جي ماپ | 14.28Khz |
| آئوٽ پٽ انٽرفيس | ٽي ٽي ايل |
| فاصلي جي قرارداد | 1 سينٽي |
| ليزر جو ذريعو | ليزر ڊيوڊ 905nm، <1mW؛ GB7247.1-2001 سان مطابقت ڪلاس 1 ليزر اکين جي حفاظت جي گهرج |
| بجلي جي فراهمي | DC 5V±10%، بجلي جو استعمال <3W شروعاتي موجوده> 1.5A |
| حجم | 78x78x56mm |
| آپريٽنگ جي درجه حرارت جي حد | -10°C- +50°C |
| اسٽوريج جي درجه حرارت جي حد | -20°C- +70°C |
| تحفظ جي سطح | IP54 |
| وزن | 190 جي |
| ڪم ڪندڙ زندگي | 50,000 ڪلاڪ معياري حالتن هيٺ |
نوٽس:
- هڪ شئي جنهن ۾ صرف 10 سيڪڙو عڪاسي ۽ ڳاڙهي رنگ آهي جنهن کي ماپي سگهجي ٿو 6m، قدار اڇو 10m تائين
- ماپ جي ورجائي جي درستگي ± 3cm آهي جڏهن ماپ جي حد 10m حاصل ڪري ٿي ۽ اسڪيننگ فریکوئنسي 10Hz آهي.
- ڊفالٽ گھمڻ جي رفتار 10 انقلاب في سيڪنڊ آھي
طول و عرض
2.1 ترتيب ڏيڻ

2.2 طول و عرض

انسٽاليشن ۽ ڪنيڪشن
3.1 تنصيب

3.2 ڪنيڪشن
3.2.1 وائرنگ ڊراگرام

3.2.2 10pin ڪنيڪشن ڪيبل جي وضاحت
| پن | فنڪشن | رنگ | نوٽس |
| 0 | +5V±10% | ڳاڙهو | ڊي سي پاور سپلائي + 5V |
| 1 | جي اين ڊي | اڇو | ڊي سي پاور گرائونڊ |
| 2 | Tx | پيلو | ٻاهرين TTL Rx سان ڳنڍيو |
| 3 | Rx | سائو | ٻاهرين TTL Tx سان ڳنڍيو |
| 4 | جي اين ڊي | ڪارو | اندروني GND سان ڳنڍيو |
3.2.3 پاور سپلائي
پاور سپلائي +5V±10%. شروعاتي جلدtage 5V ٿيڻ جي ضرورت آھي، شروعاتي موجوده 1500mA ٿيڻ جي ضرورت آھي، عام ڪم ڪندڙ موجوده 500mA آھي. بهرحال پاور سپلائي جو ريپل ڪوفيشيٽ 40mV کان وڌيڪ نه هجڻ گهرجي. فيڪٽري جي سيٽنگ اها آهي ته D10 خود بخود پاور آن ٿيڻ کان پوءِ گردش ڪرڻ شروع ڪري ٿو.
سافٽ ويئر سيٽنگ
4.1 ڊرائيور تنصيب
USB ڊرائيور ڪاميابيءَ سان انسٽال ٿيڻ کان پوءِ، Lidar کي ڪمپيوٽر سان ڳنڍيو ان جي تصديق ڪرڻ لاءِ ته اهو com پورٽ کي سڃاڻي ٿو، ۽ پوءِ پاور آن ڪريو. جيڪڏهن پاور پهريون ڀيرو آن ڪيو وڃي ۽ پوءِ ڳنڍيو وڃي، ته امڪان آهي ته ڪمپيوٽر جو ماؤس ڪنٽرول کان ٻاهر هوندو. مهرباني ڪري آپريشن جي ترتيب تي ڌيان ڏيو. هلايو "سافٽ ويئر exe file"۽ اهو عام طور تي استعمال ڪري سگهجي ٿو.
ڪجھ پي سي پاڻمرادو انسٽال ڪري سگھن ٿا ڊرائيور کي LiDAR ڳنڍڻ کان پوءِ، جيڪڏھن نه، مھرباني ڪري ڊائون لوڊ ڪريو CP210X ڊرائيور اسان جي سافٽ ويئر پيڪيج ۾.
4.2 ڊيٽا حاصل ڪرڻ
هلائڻ لاءِ 'Favelas LiDAR Point Cloud Data Acquisition and Analysis System.exe' پروگرام، ڪميونيڪيشن سيٽنگون ونڊو (ڏسو شڪل 1) پاپ اپ ٿيندو. پهريون، چونڊيو ڊيوائس D10. ٻيو، ڊوائيس سان لاڳاپيل سيريل پورٽ نمبر چونڊيو، ڪمپيوٽر سان ڳنڍيل سيريل پورٽ خودڪار طريقي سان پروگرام جي سڃاڻپ ڪري سگهجي ٿو. ٽيون، باڊ ريٽ 921600 چونڊيو. چوٿون، مانيٽرنگ انٽرفيس ۾ داخل ٿيڻ لاءِ 'ها' تي ڪلڪ ڪريو (ڏسو شڪل2). بيڊ جي شرح: 921600 بي پي ايس، برابري بٽ: ڪو به نه، ڊيٽا بٽ: 8، اسٽاپ بٽ: 1

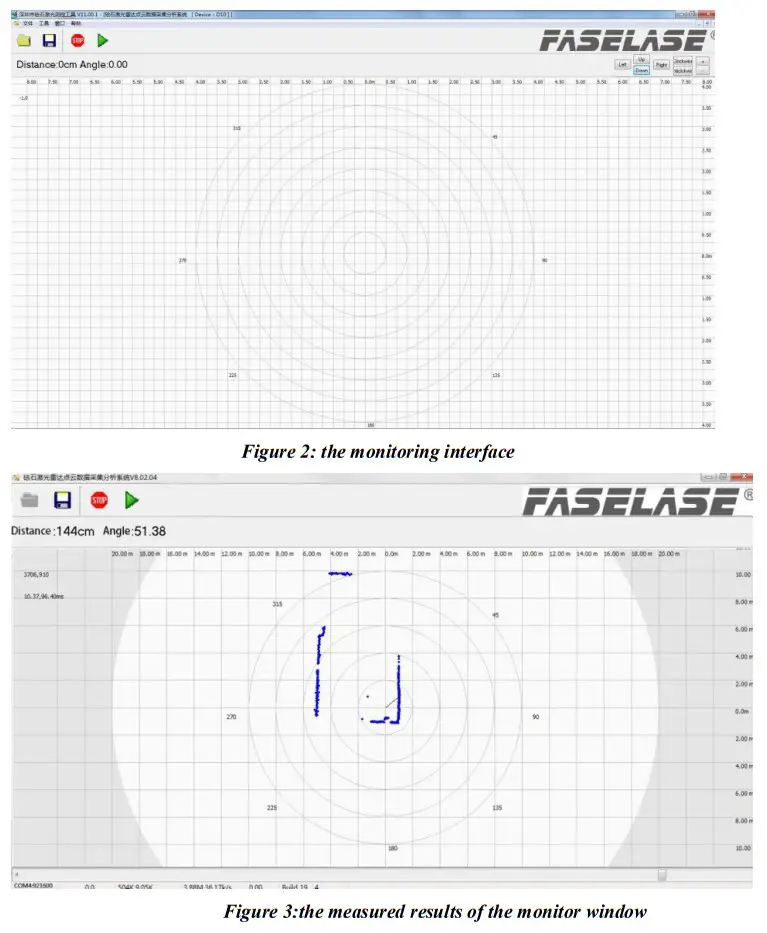
محفوظ ڪريو آئڪن تي ڪلڪ ڪريو![]() موجوده دائري ۾ مليل پوائنٽن جو تعداد ۽ هر پوائنٽ جي فاصلي ۽ زاوي کي ڏيکارڻ لاءِ.
موجوده دائري ۾ مليل پوائنٽن جو تعداد ۽ هر پوائنٽ جي فاصلي ۽ زاوي کي ڏيکارڻ لاءِ.
مانيٽر انٽرفيس ۾ ساڄي مائوس جي بٽڻ کي دٻايو 'هڪ جہتي ڊسپلي' کي چونڊڻ لاءِ هر دائري جي چڪاس جي حقيقي وقت جي ڊيٽا تبديلين کي ڏسڻ لاءِ.
محفوظ ڪريو آئڪن تي ڪلڪ ڪريو![]() ٽيسٽ ڊيٽا کي رڪارڊ ڪرڻ شروع ڪرڻ لاءِ، نالو ۽ رستو سيٽ ڪرڻ لاءِ، ڪلڪ ڪريو OK، رڪارڊنگ ختم ڪرڻ لاءِ، ڪلڪ ڪريو محفوظ ڪريو بٽڻ ٻيهر، ڪلڪ ڪريو منسوخ ڪريو پاپ اپ ونڊو ۾ ڊيٽا رڪارڊنگ کي مڪمل ڪرڻ لاءِ.
ٽيسٽ ڊيٽا کي رڪارڊ ڪرڻ شروع ڪرڻ لاءِ، نالو ۽ رستو سيٽ ڪرڻ لاءِ، ڪلڪ ڪريو OK، رڪارڊنگ ختم ڪرڻ لاءِ، ڪلڪ ڪريو محفوظ ڪريو بٽڻ ٻيهر، ڪلڪ ڪريو منسوخ ڪريو پاپ اپ ونڊو ۾ ڊيٽا رڪارڊنگ کي مڪمل ڪرڻ لاءِ.
رڪارڊ ٿيل ڊيٽا کي کولڻ جي تاريخ کي ڪلڪ ڪندي پڻ کوليو وڃي ٿو File بٽڻ
ڪميونيڪيشن پروٽوڪول
5.1 آئوٽ پٽ ڊيٽا فارميٽ
5.1.1 بائنري آئوٽ: 4 بائيٽ، ٻنهي جي فاصلي ۽ زاويه جي قيمتن سميت.
5.1.2 هر فاصلي جي امتحان واري ڊيٽا پيڪٽ ۾ 4 بائيٽ (ليبل ٿيل A، B، C، ۽ D ترتيب سان.
هر بائيٽ وٽ 8 بِٽ آهن، A7،A6،…،A1،A0، B7،B6،…،B1،B0، C7،C6،…،C1،C0.۽ D7،D10،…،D1،D0.
5.1.3 پهرين 3 بائيٽ جا MSBs 0 (A7، B7، C7) آهن، ۽ آخري بائيٽ جو MSB 1 (D7) آهي، جيڪو ڊيٽا پيڪ جي پڄاڻي کي ظاهر ڪري ٿو. هر ڊيٽا پيڪٽ ۾ 4*7 = 28 بِٽ صحيح ڊيٽا آهن.
A6، A5، A4 بائيٽ A جا چيڪ بٽ آهن. مخصوص الورورٿم لاء، مهرباني ڪري چيڪ ڪريو ڊيٽا چيڪ الگورٿم ايندڙ حصي ۾.
A3, A2, A1, A0, B6, … B0, C6 ماپيل آهن فاصلن جي قدر (مجموعي طور تي 12 بٽ)، ان جي حد آهي 0 ~ 4000 سينٽ.
C5...C0, D6,...D0 ماپيل زاويه قدر آهن (مجموعي طور تي 13 عدد). ان جي حد 0 ~ 5759 آهي، ڪوئلي جي درستگي 1/16 درجا آهي.
| بيٽس | A7 | A6 | A5 | A4 | A3 | A2 | Al | AO |
| قدر | 0 | چيڪ ڪريو | چيڪ ڪريو | چيڪ ڪريو | مفاصلو | مفاصلو | مفاصلو | مفاصلو |
| بيٽس | B7 | B6 | B5 | B4 | B3 | B2 | ب 1 | BO |
| قدر | 0 | مفاصلو | مفاصلو | مفاصلو | مفاصلو | مفاصلو | مفاصلو | مفاصلو |
| بيٽس | C7 | C6 | C5 | C4 | C3 | C2 | سي 1 | CO |
| قدر | 0 | مفاصلو | زاويه | زاويه | زاويه | زاويه | زاويه | زاويه |
| بيٽس | D7 | ڊي 10 | D5 | D4 | D3 | D2 | D1 | DO |
| قدر | 1 | زاويه | زاويه | زاويه | زاويه | زاويه | زاويه | زاويه |
ڊيٽا چيڪ الگورتھم
هر ڪردار ۾ 8 بِٽ (bit7 ~ bit0) هوندا آهن، هر بٽ 0 يا 1 ٿي سگهي ٿو. چيڪ بِٽ A6,A5,A4 گھٽ 3 بِٽ جو ذخيرو 1 جي B,C,D 3 بائيٽس جي حساب سان ڪندا آهن، جڏهن الگورٿم چيڪ ڪريو، پهرين B,C,D جي 1 بائيٽس ۾ '3' جو تعداد حاصل ڪريو ٽيبل کي ڏسي ۽ پوءِ انھن کي شامل ڪريو، ۽ پوءِ مجموعي جي ھيٺين 3 بِٽن جو مقابلو ڪريو A6,A5,A4 سان، جيڪڏھن اھي برابر آھن، ماپ جا نتيجا ڪڍو اڻ دستخط ٿيل چار GetCrcPackage4Byte (غير دستخط ٿيل چار * بف)
{. غير دستخط ٿيل چار بي، سي، ڊي؛
ب = بف[1]؛
ج = بف[2]؛
ڊي = بف[3]؛
// چِٽ 1-0 جامد غير دستخط ٿيل چار ڪيوبٽ [255] = {
0,1,1,2,1,2,2,3,1,2,2,3,2,3,3,4,1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5،
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6،
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6،
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7،
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6،
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7،
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7،
3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,4,5,5,6,5,6,6,7,5,6,6,7,6,7,7,8،
};
واپسي (ڪعب [B] + cubit [C] + chit[D])&0x07; } گھٽ 3 عددن کي واپس ڏيو 1 جو مجموعو B, C, D جي 3 بائيٽ ۾
ڊيٽا تجزيو الگورتھم
//buf ھڪڙو ڊيٽا پيڪيج پوائنٽر آھي، جيڪو 3 بائيٽ کي A، B، C جي ترتيب ۾ ذخيرو ڪري ٿو.
// واپسي جي فاصلي جي قيمت، جيڪڏهن ڊيٽا چيڪ صحيح نه آهي، واپسي -1
// انٽ ڊيڪوڊ ليس ڊيٽا (غير دستخط ٿيل چار * بف)
{ انٽ فاصلو؛ unsigned char cordate = GetCrcPackage3Byte(buf)؛
// unsigned char orgcrc = (buf[0]>>4)&0x07;
جيڪڏهن ( cordate! = (buf[0]>>4))
واپسي -1؛ ؛
// فاصلو حساب ڪريو. A0,B6..B0,C6…C0
. فاصلو = ((buf[0]&0x1)<<14)+(buf[1]&0x7F)<<7)+((buf[2]&0x7F))؛ واپسي جو فاصلو؛
}
//
//buf هڪ ڊيٽا پيڪيج پوائنٽر آهي، جيڪو 4 بائيٽس کي A، B، C ۽ D جي ترتيب سان محفوظ ڪري ٿو.
// فاصلي جي قيمت واپس ڪريو، جيڪڏهن ڊيٽا چيڪ صحيح نه آهي، واپسي -1 ٽائپ ڊيف struct{ فاصلي ۾؛
انٽ اينگل؛
}FSDNode؛
bool DecodeFSD10(FSDNode *nodelist,unsigned char *buf) { unsigned char cordate = GetCrcPackage4Byte(buf)؛// حساب ڪريو گھٽ 3 انگن جو مجموعو 1 جو مجموعو B,C,D جي 3 بائيٽ ۾
unsigned char orgcrcdata = (buf[0]>>4)&0x07;//اصل چيڪ حاصل ڪريو A6,A5,A4 if(orgcrcdata!= cordate) غلط موٽڻ؛
غير دستخط ٿيل انٽ فاصلي زاويه؛
// فاصلو حساب ڪريو
فاصلو = (buf[0]&0x0F)؛
فاصلو <<= 7؛
فاصلو += (buf[1]&0x7F)؛
فاصلو <<= 1؛
جيڪڏهن (buf[2]&0x40)
فاصلو ++؛ ناول نگار->Distance = مفاصلو؛
// ڳڻپيو زاويه
زاويه = بف [2] &0x3F؛
زاويه <<= 7؛
زاويه += (buf[3]&0x7F)؛
ناول نگار->Angle = زاويو؛
سچو موٽڻ؛
وڌيڪ انجنيئرنگ ڪيس ۽ SDK پيڪيجز حاصل ڪرڻ لاءِ اسان سان رابطو ڪريو ROS ڊرائيورن کي سپورٽ ڪندي.
تڪليف جي شوٽنگ
ماپ جي حد کي متاثر ڪندڙ عنصر
D10 هڪ نظرياتي ماپنگ ڊيوائس آهي جنهن جي ماپ جا نتيجا ماحولياتي عنصر کان متاثر ٿين ٿا. تنهن ڪري حقيقي ماپ جو نتيجو مختلف ٿي سگهي ٿو عام قدر سان جيڪو ماپي ويندي آهي معياري ماحول ۾.
هيٺيان عنصر اصل ماپنگ جي حد تي اثر انداز ڪندا.
| فڪر | متاثر ٿيندڙ نتيجو |
| گهڻ رخي عڪاسي | غلط ماپ جا نتيجا ٿي سگھن ٿا جڏھن ليزر توانائي ٻين شين مان موٽائي ھدف مان موٽندڙ توانائي کان وڌيڪ ٿي وڃي |
| شفاف مٿاڇري | غلط ماپ جا نتيجا ٿي سگھن ٿا جڏھن ماپ جو مقصد بي رنگ مائع يا شيشي آھي |
| ننڍي شئي | جڏهن ماپيل اعتراض ليزر جي جڳهه کان ننڍو آهي، يا ليزر ماپيل اعتراض جي ڪنڊ کي ماپ ڪري ٿو، غلط ماپ جا نتيجا ٿي سگهن ٿا. |
معياري ۽ اختياري لوازمات
| نه. | شيون | مقدار | ريمارڪس |
| 1 | ڊي 0 | 1 پي سي | |
| 2 | ڊيٽا ڪيبل | 1 پي سي | |
| 3 | TTL جي طرف USB ڪنورٽر | 1 پي سي | |
| 4 | ڊي سي + 5V پاور اڊاپٽر | 1 پي سي | اختياري |
اسان سان رابطو ڪريو
Xi'an Hizon بين الاقوامي واپار ڪمپنيء، لميٽيڊ
http://www.top1sensor.com
ٽيليفون: +86-29-87858956
فيڪس: +86-29-87858956
موبي: +86-13201520716 مسٽر يانگ
اي ميل: contact@top1sensor.com
شامل ڪريو: No.68 وچولي شعبي ڏکڻ، Haunching روڊ، Xi'an، چين
دستاويز / وسيلا
 |
FASELASE D10 2D LiDAR سينسر [pdf] استعمال ڪندڙ دستياب D10، D10 بي اکيون 360 درجا سينسر نيويگيشن، 360 درجا سينسر نيويگيشن، D10 2D LiDAR سينسر، D10، 2D LiDAR سينسر، LiDAR سينسر، سينسر |