TRINAMIC TMCM-1180 Stepper موٽر ڪنٽرولر يوزر گائيڊ

ٽرينامڪ موشن ڪنٽرول GmbH & Co. KG Hamburg، جرمني www.trinamic.com
تان ڊائون لوڊ ڪيو ويو Arrow.com.
1 خاصيتون
PD86-1180 هڪ مڪمل ميڪاٽرونڪ حل آهي جنهن ۾ اسٽيٽ آف دي آرٽ فيچر سيٽ آهي. اهو انتهائي ضم ٿيل آهي ۽ هڪ آسان هٿيار پيش ڪري ٿو. PD86-1180 تي مشتمل آهي NEMA 34 (فلانج سائيز 86mm) اسٽيپر موٽر، ڪنٽرولر/ڊرائيور اليڪٽرانڪس ۽ انٽيگريٽيڊ انڪوڊر. TMCM-1180 هڪ ذهين اسٽيپر موٽر ڪنٽرولر/ڊرائيور ماڊل آهي جيڪو نئين شاندار کول اسٽيپ ٽي ايم ٽيڪنالوجي کي خاص ڪري ٿو بي حسي لوڊ انحصار موجوده ڪنٽرول لاءِ. هي توانائي موثر موٽر آپريشن جي اجازت ڏئي ٿو. ترقي يافته stallGuard2TM خصوصيت سان موٽر جو لوڊ اعلي ريزوليوشن سان ڳولي سگھجي ٿو. ماڊل ڊزائين ڪيو ويو آھي سڌو سنئون ھڪڙي 86mm فلانج QMot اسٽيپر موٽر تي نصب ڪيو وڃي.
مکيه خصوصيتون
برقي ڊيٽا
- سپلائي حجمtage: +24V DC يا +48V DC نامياري
- موٽر موجوده: 5.5A RMS تائين (پروگرام قابل)
PANdrive موٽر
- ٻه مرحلو بائيپولر اسٽيپر موٽر 5.5A RMS نمبر تائين. موجوده coil
- هولڊنگ ٽوڪ: 7Nm
انڪوڊر
- Integrated sensOstep مقناطيسي انڪوڊر (وڌ ۾ وڌ 256 في گھمڻ) مثال طور قدم نقصان جي سڃاڻپ لاءِ سڀني آپريٽنگ حالتن ۽ پوزيشن جي تحت
مربوط موشن ڪنٽرولر
- موشن پروfile حقيقي وقت ۾ حساب ڪتاب (TMC428/429 موشن ڪنٽرولر)
- موٽر پيٽرولر جي اڏام تي ڦيرڦار (مثال طور پوزيشن، رفتار، تيز رفتار)
- مجموعي سسٽم ڪنٽرول ۽ سيريل ڪميونيڪيشن پروٽوڪول سنڀالڻ لاءِ اعليٰ ڪارڪردگي مائڪرو ڪنٽرولر
Bipolar stepper موٽر ڊرائيور
- مڪمل قدم تائين 256 مائڪرو اسٽيپس تائين
- اعلي-موثر آپريشن، گهٽ طاقت dissipation
- متحرڪ موجوده ڪنٽرول
- گڏيل تحفظ
- اسٽال جي سڃاڻپ لاءِ اسٽال گارڊ 2 خصوصيت
- گھٽ پاور واپرائڻ ۽ گرمي جي گھٽتائي لاءِ ٿڌي اسٽيپ خصوصيت
انٽرفيس
- اسٽاپ سوئچز (کاٻي ۽ ساڄي) ۽ گھر جي سوئچ لاءِ ان پٽ
- عام مقصد جا ان پٽ ۽ 2 عام مقصد جا نتيجا
- USB، RS232، RS485 ۽ CAN (2.0B تائين 1Mbit/s) ڪميونيڪيشن انٽرفيس
حفاظتي خاصيتون
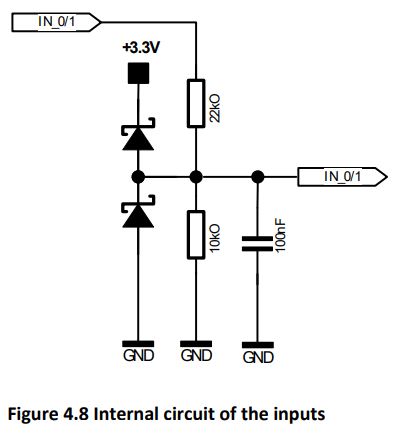
- بند ٿيل ان پٽ. ڊرائيور کي هارڊويئر ۾ غير فعال ڪيو ويندو جيستائين هي پن کليل هجي يا زمين تي ننڍو هجي
- الڳ سپلائي حجمtagڊرائيور ۽ ڊجيٽل منطق لاءِ ان پٽ - ڊرائيور سپلائي جلدtagڊجيٽل منطق جي فراهمي دوران e کي خارجي طور تي بند ڪري سگھجي ٿو ۽ ان ڪري ڊجيٽل منطق فعال رهي ٿي
سافٽ ويئر
- TMCL™ يا CANopen سان دستياب
- اسٽينڊل TMCL آپريشن يا ريموٽ ڪنٽرول آپريشن
- پروگرام ميموري (غير مستحڪم) 2048 تائين TMCL حڪمن لاءِ
- PC تي ٻڌل ايپليڪيشن ڊولپمينٽ سافٽ ويئر TMCL-IDE مفت ۾ دستياب آهي
- CANopen: CiA 301 + CiA 402 (homing mode, profile پوزيشن موڊ ۽ رفتار موڊ) جي حمايت ڪئي وئي
مھرباني ڪري ڏسو الڳ TMCL ۽ CANopen Firmware Manuals اضافي معلومات لاءِ
2 آرڊر ڪوڊس
ڪيبل شامل نه آهن. جيڪڏهن گهربل هجي ته توهان جي آرڊر ۾ مناسب ڪيبل لوم شامل ڪريو.

3 مڪينيڪل ۽ اليڪٽريڪل انٽرفيسنگ
3.1 TMCM-1180 طول و عرض ۽ چڙهندڙ سوراخ
ڪنٽرولر / ڊرائيور بورڊ جا طول و عرض (TMCM-1180) لڳ ڀڳ آهن. 86mm x 86mm 86mm اسٽيپر موٽر جي پوئين پاسي کي فٽ ڪرڻ لاءِ. TMCM-1180 21.5mm اونچائي آهي بغير ملندڙ ڪنيڪٽرن جي. M4 اسڪرو لاءِ چار چڙهندڙ سوراخ آهن.

3.2 PD86-1180 طول و عرض ۽ موٽر وضاحتون
PD86-1180 ۾ شامل آهي TMCM-1180 اسٽيپر موٽر ڪنٽرولر/ڊرائيور اليڪٽرانڪ ماڊل، هڪ مقناطيسي انڪوڊر sensOstep ٽيڪنالاجي جي بنياد تي ۽ هڪ 86mm فلانج سائيز بائيپولر هائبرڊ اسٽيپر موٽر.
3.2.1 طول و عرض PD86-3-1180

3.2.2 موٽر وضاحتون QSH8618-96-55-700

3.2.3 QSH8618-96-55-700 جو تورڪ شڪل
torque انگن اکرن کي مڪمل قدم جي آپريشن لاء موٽر torque خاصيتن کي بيان ڪري ٿو ته جيئن سادي مقابلي جي اجازت ڏين. مڪمل قدم جي آپريشن لاء، اتي هميشه گونج پوائنٽن جو تعداد (گهٽ torque سان) آهن جن کي ظاهر نه ڪيو ويو آهي. اهي microstep آپريشن ذريعي گھٽجي ويندا.

TMCM-3.3 جا 1180 ڪنيڪٽر
PD86-1180 جو ڪنٽرولر/ڊرائيور بورڊ اٺ ڪنيڪٽر پيش ڪري ٿو، جنهن ۾ موٽر ڪنيڪٽر شامل آهن، جيڪو اندروني طور استعمال ڪيو ويندو آهي موٽر ڪوئلز کي اليڪٽرانڪس سان ڳنڍڻ لاءِ. پاور ڪنيڪٽر کان علاوه سيريل ڪميونيڪيشن لاءِ ٻه رابطا آهن (هڪ مني-USB لاءِ ۽ هڪ RS232/RS485/CAN لاءِ) ۽ ٻه ڪنيڪٽر اضافي ان پٽ ۽ آئوٽ پٽ سگنلن لاءِ. ان کان علاوه ھڪڙو ڪنيڪٽر آھي قدم / ھدايت لاءِ ۽ ٻيو انڪوڊر لاءِ. آئوٽ کنیکٹر پيش ڪري ٿو ٻه عام مقصد جا آئوٽ، هڪ پاور سپلائي والtage output، ۽ هڪ هارڊويئر بند ان پٽ. بند ٿيل ان پٽ کي کليل ڇڏڻ يا ان کي زمين سان ڳنڍڻ سان موٽر ڊرائيور کي بند ڪري ڇڏيندوtage هارڊويئر ۾. آپريشن لاء، ھن ان پٽ کي سپلائي حجم سان ڳنڍيو وڃيtage. ان پٽ ڪنيڪٽر اسٽاپ سوئچز (کاٻي ۽ ساڄي) لاءِ ٻه انپٽ پيش ڪري ٿو، هڪ گهر سوئچ ان پٽ، ٻه عام مقصد جا ان پٽ ۽ هڪ ڪنيڪشن سسٽم يا سگنل گرائونڊ سان.



3.3.1 پاور کنیکٹر
هي ماڊل ڊجيٽل منطق (پن 2) ۽ ڊرائيور / پاور ايس لاءِ الڳ پاور سپلائي ان پٽ پيش ڪري ٿوtage (پن 1). ٻئي سپلائي ان پٽ عام زميني ڪنيڪشن استعمال ڪن ٿا (پن 3 ۽ 4). هن طريقي سان، ڊرائيور لاء بجلي جي فراهمي جيtage کي بند ڪري سگھجي ٿو جڏهن اڃا تائين پوزيشن ۽ اسٽيٽس جي معلومات کي برقرار رکندي جڏهن ڊجيٽل منطق جي فراهمي کي چالو رکيو وڃي.
+UDRIVER سپلائي صرف ان صورت ۾ پاور سپلائي صرف پاور سيڪشن کي فراهم ڪئي وئي آهي، هڪ اندروني ڊيوڊ پڻ پاور سيڪشن کي ورهائيندو. تنهن ڪري، جڏهن الڳ بجلي جي فراهمي جي ضرورت ناهي ته اهو صرف ماڊل کي طاقت ڏيڻ لاء پن 1 ۽ 4 استعمال ڪرڻ ممڪن آهي.

يونٽ جي قابل اعتماد آپريشن کي يقيني بڻائڻ لاءِ، پاور سپلائي وٽ ڪافي آئوٽ پُٽ ڪيپيسٽر هجڻ ضروري آهي ۽ سپلائي ڪيبلز کي گهٽ مزاحمت هجڻ گهرجي، ته جيئن هيليڪپر جي آپريشن سان يونٽ تي سڌي طرح پاور سپلائي جي واڌ نه ٿئي. هيليڪپر جي آپريشن جي ڪري پاور سپلائي ريپل کي وڌ ۾ وڌ ڪجهه 100mV تي رکڻ گهرجي.
بجلي جي فراهمي لاء اشارو
- پاور سپلائي ڪيبل کي جيترو ٿي سگھي ننڍو رکو
- پاور سپلائي ڪيبل لاء وڏي قطر استعمال ڪريو

3.3.2 سيريل ڪميونيڪيشن ڪنيڪٽر
هڪ 2mm پچ 8 پن کنیکٹر سيريل ڪميونيڪيشن لاءِ استعمال ڪيو ويندو آهي. ھن ڪنيڪٽر سان ماڊل RS232، RS485 ۽ CAN ڪميونيڪيشن کي سپورٽ ڪري ٿو.

3.3.3 USB ڪنيڪٽر
هڪ 5-پن مني-USB ڪنيڪٽر بورڊ تي موجود آهي (شايد اسيمبلي جي اختيار تي منحصر هجي).

3.3.4 آئوٽ پٽ ڪنيڪٽر
ھڪڙو 2mm پچ 4 پن ڪنيڪٽر ٻن عام مقصد جي ٻاھرين ۽ ڊرائيور کي ڳنڍڻ لاء استعمال ڪيو ويندو آھي.tagاي هارڊويئر بند ان پٽ پن کي يونٽ ڏانهن.
موٽر ڊرائيور کي فعال ڪرڻ لاءtage ڳنڍيو /شٽ ڊائون (پن 2) کي +Ulogic (پن 1) تائين!


3.3.5 ان پٽ ڪنيڪٽر
ھڪڙو 2mm پچ 6 پن ڪنيڪٽر عام مقصد جي انپٽس، گھر ۽ اسٽاپ سوئچز کي يونٽ سان ڳنڍڻ لاء استعمال ڪيو ويندو آھي.
ميٽنگ ڪنيڪٽر هائوسنگ: PHR-6 ميٽنگ ڪنيڪٽر رابطا: SPH-002T-P0.5S

3.2.5.1 کاٻي ۽ ساڄي حد جي سوئچز
TMCM-1180 کي ترتيب ڏئي سگهجي ٿو ته جيئن هڪ موٽر کي کاٻي ۽ ساڄي حد جي سوئچ هجي (شڪل 4.9).
موٽر بند ٿي وڃي ٿي جڏهن مسافر هڪ حد تائين پهچي ويو آهي سوئچز.

3.2.5.2 ٽرپل سوئچ ڪنفيگريشن
اهو ممڪن آهي ته ريفرنس سوئچ پوزيشن جي چوڌاري رواداري رينج پروگرام ڪرڻ. هي ٽرپل سوئچ ترتيب ڏيڻ لاءِ مفيد آهي، جيئن تصوير 4.10 ۾ بيان ڪيو ويو آهي. انهي ترتيب ۾ ٻه سوئچ خودڪار اسٽاپ سوئچز طور استعمال ڪيا ويا آهن، ۽ هڪ اضافي سوئچ استعمال ڪيو ويندو آهي ريفرنس سوئچ جي وچ ۾ کاٻي اسٽاپ سوئچ ۽ ساڄي اسٽاپ سوئچ جي وچ ۾. کاٻي اسٽاپ سوئچ ۽ ريفرنس سوئچ گڏجي وائرڊ ٿيل آهن. سينٽر سوئچ (سفر سوئچ) محور جي نگراني جي اجازت ڏئي ٿو ته جيئن قدم جي نقصان کي ڳولڻ لاء.

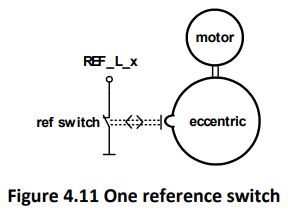
3.2.5.3 سرڪيولر سسٽم لاءِ هڪ حد جي سوئچ
جيڪڏهن هڪ سرڪيولر سسٽم استعمال ڪيو ويندو آهي (شڪل 4.11)، صرف هڪ حوالو سوئچ ضروري آهي، ڇاڪاڻ ته اهڙي سسٽم ۾ ڪو به آخري پوائنٽ نه آهي.
3.3.6 قدم/هدايت ڪنيڪٽر
هڪ 2mm پچ 4 پن ڪنيڪٽر استعمال ڪيو ويندو آهي اسٽيپ/ڊير انٽرفيس کي ڳنڍڻ لاءِ.

3.3.7 انڪوڊر ڪنيڪٽر
انڪوڊر کي ڳنڍڻ لاءِ هڪ 2mm پچ 5 پن کنیکٹر استعمال ڪيو ويندو آهي.
ميٽنگ ڪنيڪٽر هائوسنگ: PHR-5 ميٽنگ ڪنيڪٽر رابطا: SPH-002T-P0.5S

3.3.8 موٽر ڪنيڪٽر ۽ وضاحتون
هڪ 3.96mm پچ 4 پن ڪنيڪٽر موٽر ڪنيڪشن لاءِ استعمال ڪيو ويندو آهي. ٻئي موٽر ڪوئل وائنڊنگز (بائيپولر اسٽيپر موٽر) هن ڪنيڪٽر سان ڳنڍيل آهن.
ميٽنگ ڪنيڪٽر هائوسنگ: VHR-4N ميٽنگ ڪنيڪٽر رابطا: BVH-21T-P1.1

4 جمپر
بورڊ جون اڪثر سيٽنگون سافٽ ويئر ذريعي ڪيون وينديون آهن. تنهن هوندي به، ڪجهه جمپر ترتيب ڏيڻ لاء موجود آهن.

4.1 RS485 بس ٽرمينيشن
بورڊ ۾ RS120 انٽرفيس جي مناسب بس ختم ڪرڻ لاءِ 485 اوهم ريزسٽر شامل آهي. جڏهن هي جمپر بند ڪيو ويندو، رزسٽر کي ٻن مختلف بس لائينن RS485+ ۽ RS485- جي وچ ۾ رکيو ويندو.
4.2 CAN بس ٽرمينيشن
بورڊ ۾ CAN انٽرفيس جي مناسب بس ختم ڪرڻ لاءِ 120 اوهم ريزسٽر شامل آهي. جڏهن هي جمپر بند ڪيو ويندو، رزسٽر کي ٻن مختلف بس لائينن CAN_H ۽ CAN_L جي وچ ۾ رکيو ويندو.
5 آپريشنل درجه بندي
هيٺ ڏنل ڏيکاريل آپريشنل درجه بندي ڊيزائن جي قدرن جي طور تي استعمال ٿيڻ گهرجي. ڪنهن به صورت ۾ آپريشن دوران وڌ ۾ وڌ قدر نه ٿيڻ گهرجي.

*) ڪنٽرولر ڊرائيور اليڪٽرانڪس کي 5.5 منٽ لاءِ فل ڪرنٽ (30A RMS) تي هلندڙ موسمياتي چيمبر جي اندر آزمايو ويو آهي 50 ° C ماحولياتي گرمي پد تي هوا جي منتقلي کان سواءِ.
موٽر 50 ° C کان مٿي گرم ٿي سگھي ٿي جڏهن مناسب ٿڌي بغير مڪمل ڪرنٽ تي هلندي. اهو شايد اليڪٽرانڪس لاء ماحولياتي گرمي کي وڌائي سگھي ٿو. جڏهن کوليو اسٽيپ آپريشن موڊ استعمال ڪريو، حقيقي موجوده پروگرام ٿيل وڌ کان گهٽ ٿي سگهي ٿي. موجوده پيداوار ۽ گرمي پد.
6 فنڪشنل وضاحت
شڪل 7.1 ۾ PD86-1180 جا مکيه حصا ڏيکاريا ويا آهن. PANdrive بنيادي طور تي µC تي مشتمل آهي (EEPROM TMCL ميموري سان ڳنڍيل آهي)، TMC428/429 موشن ڪنٽرولر، TMC262A-PC پاور ڊرائيور پنهنجي توانائيءَ جي موثر CoolStep خصوصيت سان، ٻاهرين MOSFET ڊرائيور جي.tagاي، QSH8618 اسٽيپر موٽر، ۽ مربوط sensOstep انڪوڊر. متبادل طور تي اهو ممڪن آهي ته هڪ خارجي انڪوڊر سان ڳنڍڻ. نامناسب سپلائي حجمtagاهي 24VDC يا 48VDC آهن.

6.1 سسٽم آرڪيٽيڪچر
TMCM-1180 هڪ مائڪرو ڪنٽرولر کي TMCL (ٽرينامڪ موشن ڪنٽرول ٻولي) آپريٽنگ سسٽم سان ضم ڪري ٿو. موشن ڪنٽرول حقيقي وقت جا ڪم TMC428/429 پاران محسوس ڪيا ويا آهن.
6.1.1 مائڪرو ڪنٽرولر
هن ماڊل تي، Atmel AT91SAM7X256 TMCL آپريٽنگ سسٽم کي هلائڻ ۽ TMC428/429 کي ڪنٽرول ڪرڻ لاء استعمال ڪيو ويندو آهي. سي پي يو ۾ 256KB فليش ميموري ۽ 64KB ريم آهي. مائڪرو ڪنٽرولر TMCL (Trinamic Motion Control Language) آپريٽنگ سسٽم کي هلائي ٿو جيڪو TMCL حڪمن تي عمل ڪرڻ ممڪن بڻائي ٿو جيڪي RS232، RS485، USB، يا CAN انٽرفيس ذريعي ميزبان کان ماڊل ڏانهن موڪليا ويا آهن. مائڪرو ڪنٽرولر TMCL حڪمن جي تشريح ڪري ٿو ۽ TMC428/429 کي ڪنٽرول ڪري ٿو جيڪو حرڪت واري حڪمن تي عمل ڪري ٿو. ان کان علاوه اهو انڪوڊر انٽرفيس سان ڳنڍيل آهي ۽ ان پٽ کي پروسيس ڪري ٿو. مائڪرو ڪنٽرولر جو فليش ROM TMCL آپريٽنگ سسٽم رکي ٿو. TMCL آپريٽنگ سسٽم کي RS232 انٽرفيس ذريعي يا CAN انٽرفيس ذريعي اپڊيٽ ڪري سگھجي ٿو. ھي ڪرڻ لاءِ TMCL-IDE استعمال ڪريو.
6.1.2 EEPROM
اسٽينڊ اڪيلو آپريشن لاءِ TMCL پروگرامن کي ذخيرو ڪرڻ لاءِ TMCM-1180 ماڊل مائڪرو ڪنٽرولر سان ڳنڍيل 16kByte EEPROM سان ليس آهي. EEPROM 2048 TMCL حڪمن تي مشتمل TMCL پروگرامن کي ذخيرو ڪري سگھي ٿو. EEPROM پڻ استعمال ڪيو ويندو آهي ترتيب واري ڊيٽا کي ذخيرو ڪرڻ لاء.
6.1.3 موشن ڪنٽرولر
TMC428/429 هڪ اعلي ڪارڪردگي اسٽيپر موٽر ڪنٽرول IC آهي ۽ ٽن 2-مرحلي-اسٽيپر-موٽرز تائين ڪنٽرول ڪري سگهي ٿو. موشن پيٽرولر جهڙوڪ اسپيڊ يا ايڪسلريشن TMC428/429 ڏانهن SPI ذريعي مائڪرو ڪنٽرولر ذريعي موڪليا ويا آهن. آر جي حساب سانampايس ۽ اسپيڊ پروfiles اندروني طور تي هارڊويئر ذريعي ڪيا ويا آهن ٽارگيٽ موشن پيٽرولر جي بنياد تي.
6.1.4 اسٽيپر موٽر ڊرائيور
TMC262A-PC بائيپولر اسٽيپر موٽرز لاءِ هڪ توانائيءَ وارو اعليٰ موجوده اعليٰ صحت واري مائڪرو اسٽيپنگ ڊرائيور IC آهي. هي ڊرائيور TMCM-1180 ماڊل تي هڪ خاص نسخو آهي TMC262 پاور ڊرائيور PANDdrives لاءِ QSH8618 موٽرز سان.
ان جو منفرد اعليٰ ريزوليوشن sensorless لوڊ ڳولڻ وارو اسٽال گارڊ 2 استعمال ڪيو ويندو آهي خاص انٽيگريٽڊ لوڊ انحصار موجوده ڪنٽرول فيچر لاءِ جنهن کي کول اسٽيپ سڏيو ويندو آهي. لوڊ کي پڙهڻ جي صلاحيت ۽ اوورلوڊ کي ڳولڻ جي صلاحيت TMC262 کي ڊرائيو لاءِ هڪ بهترين انتخاب بڻائي ٿي جتي اعليٰ اعتماد گهربل هجي. TMC262 ھلائي سگھجي ٿو قدم / ھدايت سگنل سان گڏو گڏ سيريل SPITM ذريعي.

CoolStep موجوده ريگيوليٽر کي ڊرائيور جي ردعمل کي ڪنٽرول ڪرڻ جي اجازت ڏئي ٿي لوڊ وڌائڻ يا گھٽائڻ. اندروني ريگيوليٽر ٻن حدن کي استعمال ڪري ٿو گھٽ ۾ گھٽ ۽ وڌ ۾ وڌ لوڊ زاويه کي طئي ڪرڻ لاء موٽر آپريشن لاء. موجوده واڌ جي رفتار ۽ موجوده گھٽتائي جي رفتار کي ايپليڪيشن سان ترتيب ڏئي سگهجي ٿو. اضافي طور تي، هيٺين موجوده حد مقرر ڪري سگھجي ٿو مٿئين موجوده حد جي حوالي سان موجوده اسڪيل پيٽرولر سي ايس پاران مقرر ڪيل.
6.1.5 sensOstep Encoder
هن يونٽ ۾ استعمال ٿيل sensOstep انڪوڊر گهٽ ريزوليوشن سان مقناطيسي ڪوئلي پوزيشن انڪوڊر سسٽم تي ٻڌل آهي. اهو هڪ ننڍڙو مقناطيس تي مشتمل هوندو آهي جيڪو اسٽيپر موٽر جي محور جي پوئين پڇاڙيءَ ۾ رکيل هوندو آهي ۽ هڪ هال-سينسر IC انٽيگريٽيڊ ڊجيٽل سگنل پروسيسنگ سان گڏ هوندو آهي (مثال طور خودڪار حاصل ڪنٽرول، درجه حرارت جي معاوضي وغيره لاءِ) مقناطيس جي مٿان رکيل آهي موٽر جي پوئين پاسي. نصب ٿيل پرنٽ ٿيل سرڪٽ بورڊ. انڪوڊر 8 بٽ (256 مرحلا) في انقلاب جي قرارداد پيش ڪري ٿو جيڪو مڪمل طور تي ڪافي آهي قدمن جي نقصانن کي ڳولڻ لاءِ معياري 1.8° اسٽيپر موٽرز سان.
7 TMCM-1180 آپريشنل تفصيل
7.1 ڳڻپ: رفتار ۽ رفتار بمقابله مائڪرو اسٽيپ ۽ فل اسٽيپ فريڪوئنسي
TMC428/429 ڏانهن موڪليل پيرا ميٽرن جي قيمتن ۾ عام موٽر ويل نه هوندا آهن جهڙوڪ گردش في سيڪنڊ جي رفتار جي حساب سان. پر اهي قيمتون حساب ڪري سگهجن ٿيون TMC428/429-پيراميٽرز مان جيئن هن حصي ۾ ڏيکاريل آهي.


8 TMCL
TMCL، ٽرينامڪ موشن ڪنٽرول ٻولي، الڳ الڳ دستاويزن ۾ بيان ڪيل آهي، جيڪي مخصوص پروڊڪٽس (مثال طور TMCM-1180 TMCL فرم ویئر مينوئل) ڏانهن اشارو ڪن ٿيون. دستياب دستياب آهن www.trinamic.com. مھرباني ڪري انھن ذريعن جو حوالو ڏيو تازه ڪاري ڊيٽا شيٽ ۽ ايپليڪيشن نوٽس لاءِ.
9 CAN کوليو
TMCM-1180 ماڊل پڻ استعمال ڪيو وڃي CANopen پروٽوڪول سان مستقبل جي ورزن ۾. هن مقصد لاء، هڪ خاص CANopen firmware ترقي هيٺ آهي. مهرباني ڪري رابطو ڪريو TRINAMIC جيڪڏهن توهان هن اختيار ۾ دلچسپي رکو ٿا.
10 لائف سپورٽ پاليسي
TRINAMIC Motion Control GmbH & Co. KG، TRINAMIC Motion Control GmbH & Co. KG جي مخصوص تحريري رضامندي کان سواءِ، لائف سپورٽ سسٽم ۾ استعمال لاءِ پنھنجي پروڊڪٽس مان ڪنھن کي به اجازت يا ضمانت نٿو ڏئي.
لائف سپورٽ سسٽم اهي سامان آهن جيڪي زندگي جي حمايت يا برقرار رکڻ جو ارادو رکن ٿا، ۽ جن جي انجام ڏيڻ ۾ ناڪامي، جڏهن مهيا ڪيل هدايتن جي مطابق صحيح طور تي استعمال ڪيو وڃي، مناسب طور تي اميد رکي سگهجي ٿو ته نتيجي ۾ ذاتي زخم يا موت.
© TRINAMIC Motion Control GmbH & Co. KG 2013 هن ڊيٽا شيٽ ۾ ڏنل معلومات کي مڃيو وڃي ٿو صحيح ۽ قابل اعتماد. تنهن هوندي به نه ذميواري ان جي استعمال جي نتيجن لاء ۽ نه ئي پيٽرن جي ڪنهن به خلاف ورزي يا ٽئين پارٽين جي ٻين حقن لاء، جيڪا شايد ان جي استعمال جي نتيجي ۾ ٿي سگهي ٿي. وضاحتون بغير نوٽيس جي تبديلي جي تابع آهن. استعمال ٿيل سڀئي ٽريڊ مارڪ انهن جي لاڳاپيل مالڪن جي ملڪيت آهن.

11 نظرثاني جي تاريخ
11.1 هارڊويئر نظرثاني

11.2 هارڊويئر نظرثاني

12 حوالا
[TMCM-1180 / PD86-1180 TMCL] TMCM-1180 ۽ PD86-1180 TMCL فرم ويئر دستياب[TMCL-IDE] TMCL-IDE يوزر مينوئل
[QSH8618] QSH8618 دستور
مهرباني ڪري حوالو ڏيو www.trinamic.com.
دستاويز / وسيلا
 |
ٽرينامڪ TMCM-1180 اسٽيپر موٽر ڪنٽرولر [pdf] استعمال ڪندڙ ھدايت TMCM-1180 Stepper موٽر ڪنٽرولر, TMCM-1180, Stepper موٽر ڪنٽرولر, موٽر ڪنٽرولر, ڪنٽرولر |